
- 動力・機械部品
- モーター・モーター制御
- DCサーボドライブ
- ADVANCED Motion Controls
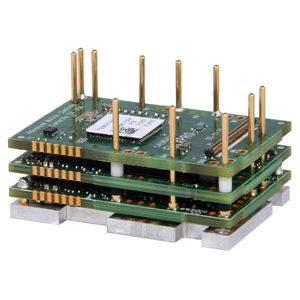
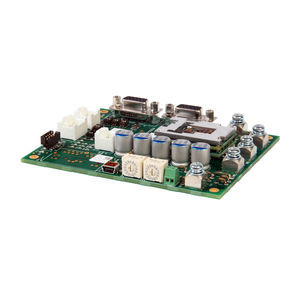
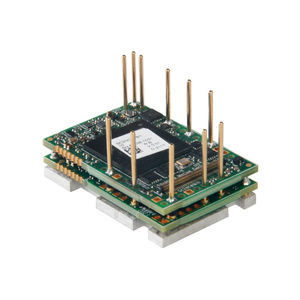
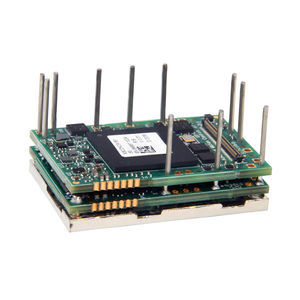
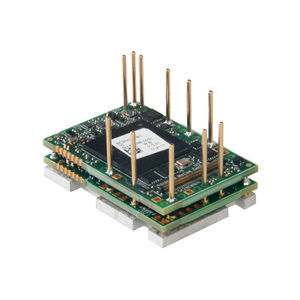
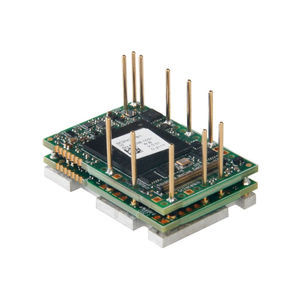
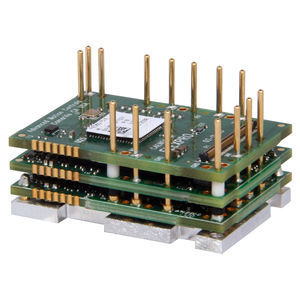
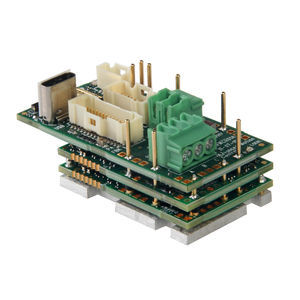
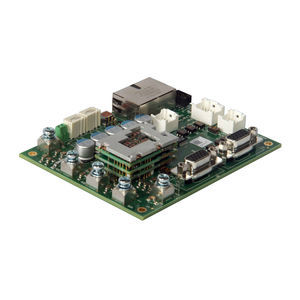
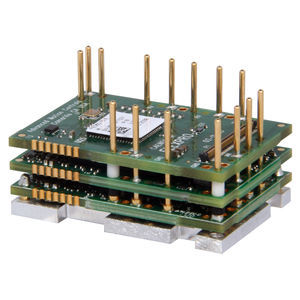
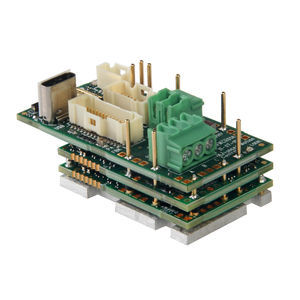
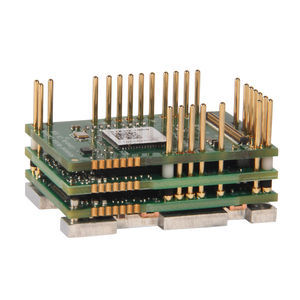
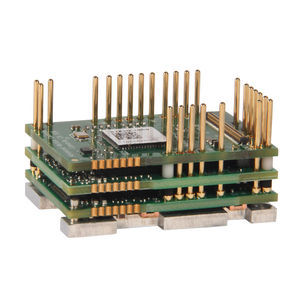
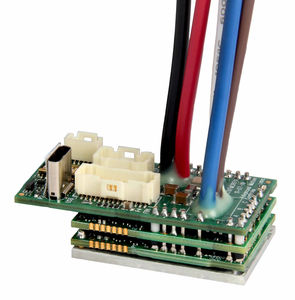
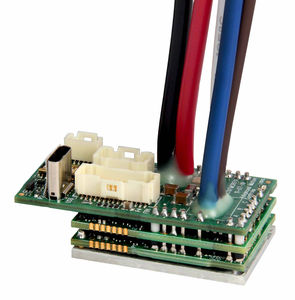
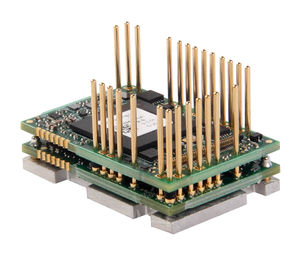
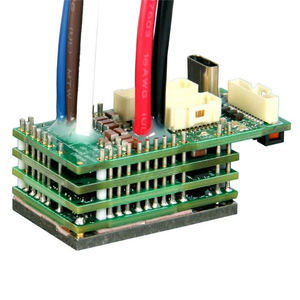
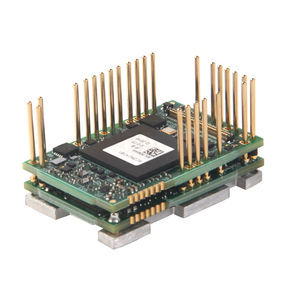
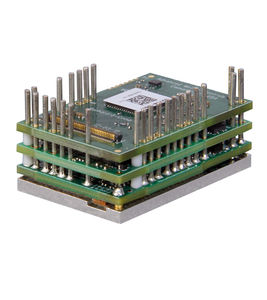
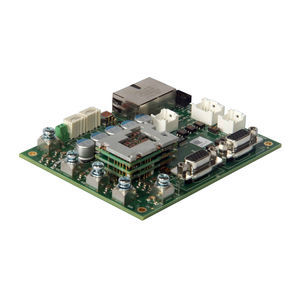
プリント基板用サーボドライブ FXE060-5-EMDCブラシレス誘導


お気に入りに追加する
商品比較に追加する
特徴
- AC/DC
- DC
- エンジン
- ブラシレス, 誘導, ステッピング, ブラシ付き, 単相モーター, 三相モータ用
- 出力信号
- USB接続, EtherCAT
- ボルテージ
- 10-55 V
- その他の特徴
- STO, プリント基板用
- アンペア数
5 A
最大: 10 A
最少: 0 A
- 消費電力
272 W
(0.36982 hp)
詳細
IMPACT™アーキテクチャ搭載のFlexPro®拡張環境サーボドライブFXE060-5-EMは、すべてのサーボループのフルチューニング制御を提供し、分散型または集中型のサーボシステム向けに設計されています。このサーボドライブはEtherCAT®通信を利用し、USBインターフェイスを介して起動します。
制御/コマンド
- ±10 Vアナログ
- ステップ&方向(5V)
- エンコーダ追従
- インデックス
- ジョギング
- ネットワーク経由
- シーケンス
プライマリーフィードバック
- BiSS Cモード
- エンデータ2.2
- ホールズ
- インクリメンタルエンコーダ
- タコメーター(±10 VDC)
動作モード
- プロファイル・モード
- 周期的同期モード
- 電流
- 位置
- 速度
モータータイプ
- 三相(ブラシレス)
- 単相(ブラシ付)
- ACインダクション
- ステッパー
---
ビデオ
カタログ

FlexPro Catalog
8 ページ
見本市
この販売者が参加する展示会

ADVANCED Motion Controlsのその他の関連商品
digital servo drives FlexPro®



































*価格には税、配送費、関税また設置・作動のオプションに関する全ての追加費用は含まれておりません。表示価格は、国、原材料のレート、為替相場により変動することがあります。