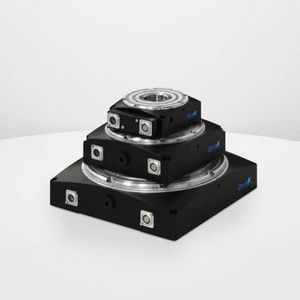
METISをご紹介します。METISは、ステップ・スキャン・アプリケーション用に設計された最先端のハイブリッド平面メカニカル/エア・ベアリング・プラットフォームで、4自由度にわたって比類のない精度、移動・定着時間、速度安定性を保証します。
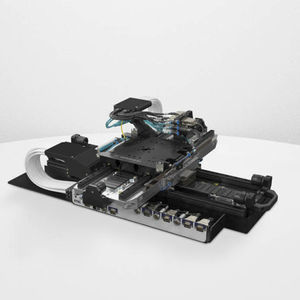
METISプラットフォームは最先端のハイブリッド平面メカニカル/エアベアリングプラットフォームで、X、Y、Z、θ方向の4軸移動が可能なステップおよびスキャンアプリケーション専用です。全移動範囲にわたるダイナミックな平坦性と双方向の繰り返し精度により、高精度な作業に最適です。METISは、クリティカルディメンションや薄膜測定、ウェーハスクライビング、ウェーハレーザーサーマルアニールなどのウェーハプロセス制御アプリケーションで広く使用されています。また、Back End Of Lineリソグラフィ装置(マスクアライナー)や一部のウェーハダイシングアプリケーションにも適しています。
METISは信頼性の高い性能を提供し、先端半導体およびフォトニクス・アプリケーションに不可欠なツールとなっています。
特徴
METISはメカニカルベアリングとエアベアリングテクノロジーを組み合わせ、究極の精度と柔軟性を実現しています。
METISはX、Y、Z、θ軸の移動が可能で、ステップやスキャンのアプリケーションに最適です。
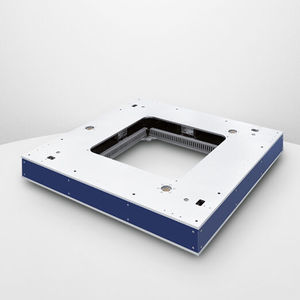
このプラットフォームは、全移動範囲にわたって高い動的平坦性と高い双方向繰返し精度を提供します。
METISは、ウェーハプロセス制御、ウェーハスクライビング、レーザーサーマルアニーリングに使用されています。
このプラットフォームは、高度な半導体およびフォトニクス・アプリケーションに信頼性の高い性能を提供します。
METISはバックエンドリソグラフィ装置やウェーハダイシングアプリケーションにも適しています。
METISの主な特長は以下の通りです:
フラットな動き
エアベアリングテクノロジーにより、全移動範囲で維持されます。
---