ビンピッキングアプリケーション用のデュアルレーザー三角測量技術。
1.
オペレーターはもはや不健康な作業に追われることなく、ラインパフォーマンスの向上に集中することができます。
2.
実現された製品が変わっても、機械部品を交換する必要がない。
3.
柔軟でコンパクトなソリューション。既存のワークセルにも設置可能。
EYET+ PICK LTはビンの上に固定されます。
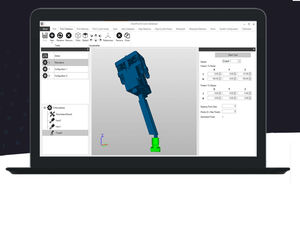
EYET+ PICK LTは、デュアルレーザーライン三角測量技術に基づく3Dビジョン装置で、最大解像度で毎秒約1,500,000ポイントを達成するスマートカメラを内蔵しています。
固定システム
1つの画像をビン全体に広げる必要があります。ビン底部の解像度が低くなり、ピッキング精度が低下します。
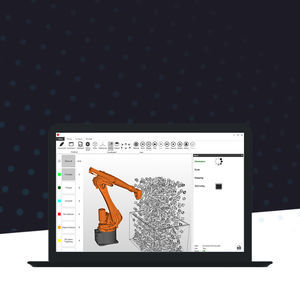
回転式システム
システムは移動しながら複数の画像を取得するため、センサーの解像度を乗算するようなものです。ビンの深さ全体にわたって確実な解像度とピッキング精度が得られます。
---