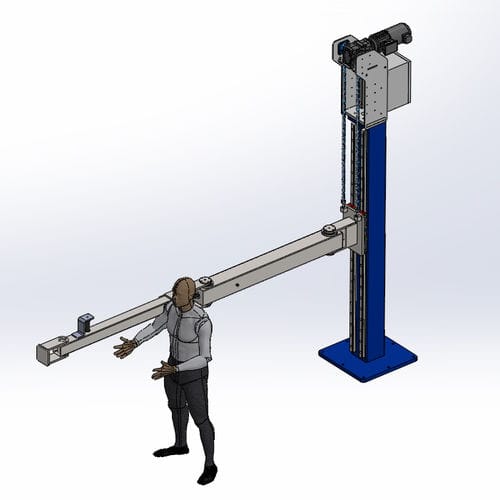
マニピュレータおよび製品自体の操作/下降キネマティクスは、非常に高い抵抗を有する2つの特別なチェーンによって作動する垂直スライドシステムによって行われ、これは完全に自動電子バランシングシステムを有する電気群によって操縦される。
内蔵マイクロプロセッサは、持ち上げられた物体の重量を瞬時かつ連続的に検出し、オペレーターが空気圧で必要とされる追加の調整を行うことなく、任意の位置または構成でマニピュレータを連続的かつ自動バランシングを可能にします。 マニピュレータ。
電子マニピュレータを使用すると、オペレータは、サイクルフェーズ(ドラム、サック、ドラムを空にする場合など)の間に異なる重みを持ち上げて操作することができます。追加の調整を行うことなく、ランダムな順序で行うことができます。
---