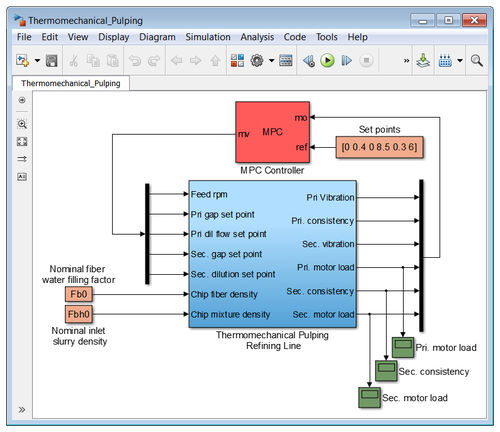
Design and simulate model predictive controllersModel Predictive Control Toolbox™ provides functions, an app, and Simulink® blocks for systematically analyzing, designing, and simulating model predictive controllers (MPCs). You can specify plant and disturbance models, horizons, constraints, and weights. The toolbox enables you to diagnose issues that could lead to run-time failures and provides advice on tuning weights to improve performance and robustness. By running different scenarios in linear and nonlinear simulations, you can evaluate controller performance.You can adjust the performance of the controller as it runs by tuning weights and varying constraints. You can implement adaptive model predictive controllers by updating the plant model at run time. For applications with fast sample times, you can develop explicit model predictive controllers. For rapid prototyping and embedded system design, the toolbox supports C-code and IEC 61131-3 Structured Text generation.