- Mecânica - Transmissão de potência
- Motor e Controle de Motor
- Servoconversor CC
- Beckhoff Automation
- Produtos
- Catálogos
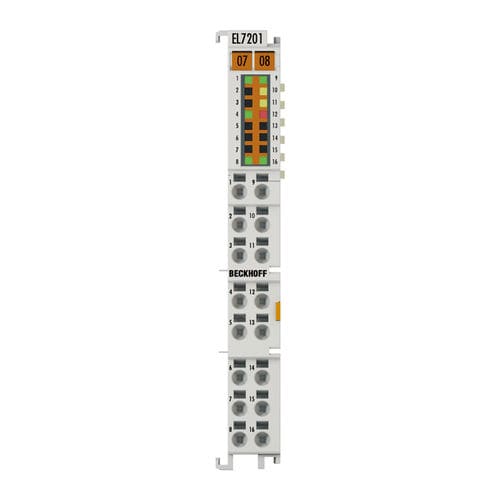
Servoconversor CC EL7201de 1 eixoEtherCATpara caixa de junção

Guardar nos favoritos
Comparar
Características
- CA/CC
- CC
- Número de eixos
- de 1 eixo
- Sinal de saída
- EtherCAT
- Uso previsto
- de posicionamento, para caixa de junção
- Tensão
- 50 V
- Outras características
- compacto, de alto desempenho, controlador de velocidade
- Intensidade de corrente
2,8 A, 4,5 A, 10 A
Descrição
O terminal EtherCAT do servomotor EL7201, com interface resolver integrada, oferece um elevado desempenho servo num design muito compacto. A tecnologia de controlo rápido, baseada na corrente orientada para o campo e no controlo de velocidade PI, suporta tarefas de posicionamento rápidas e altamente dinâmicas. A monitorização de numerosos parâmetros, tais como sobretensão e subtensão, sobrecorrente, temperatura do terminal ou carga do motor através do cálculo de um modelo I²T, oferece a máxima fiabilidade operacional. EtherCAT, como comunicação de sistema de alto desempenho, e CAN-over-EtherCAT (CoE), como camada de aplicação, permitem uma interface ideal com a tecnologia de controlo baseada em PC. Os mais recentes semicondutores de potência garantem uma perda mínima de energia e permitem a realimentação da ligação CC durante a travagem. 16 LEDs indicam mensagens de estado, de aviso e de erro, bem como eventuais limitações activas.
---
Feiras de negócios
Próximas feiras onde poderá encontrar este fornecedor

Outros produtos Beckhoff Automation
I/O





















Pesquisas relacionadas
- Servoconversor
- Servomotor elétrico
- Servomotor CA
- Servoconversor de corrente contínua
- Servoconversor fieldbus
- Servomotor performance
- Servomotor ultracompacto
- Servoconversor digital
- Motor linear
- Servomotor IP65
- Servoconversor EtherCAT
- Servoconversor compacto
- Servomotor 400 V
- Servomotor 230 V
- Servoconversor de alto desempenho
- Servoconversor trifásico
- Servoconversor integrado
- Motor linear CC
- Motor linear síncrono
- Servoconversor de controle
* Os preços não incluem impostos, transporte, taxas alfandegárias, nem custos adicionais associados às opções de instalação e de ativação do serviço. Os preços são meramente indicativos e podem variar em função dos países, do custo das matérias-primas e das taxas de câmbio.