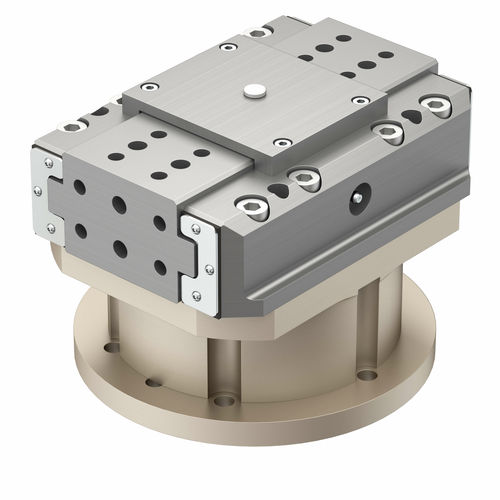
Pinça robusta de 2 garras paralelas com guia deslizante em aço e flange ISO para montagem directa no robô
Características
- Construção extremamente robusta devido à guia deslizante de aço sobre aço
- Elevadas forças e momentos de agarramento possíveis
- Versões disponíveis com manutenção de força de aperto através de mola
- Flange ISO para adaptação directamente no robô
Princípio de funcionamento
O movimento paralelo das mandíbulas é gerado por um plano inclinado em combinação com um cilindro pneumático de dupla acção. As mandíbulas são guiadas em guias planas temperadas e retificadas feitas de aço para ferramentas. Os elementos de guia são adicionalmente revestidos com Duralloy- e obtêm assim elevadas propriedades de funcionamento de emergência, muito boa resistência à corrosão, muito alta resistência ao desgaste e elevada capacidade de carga superficial.
---