O software KC Implementation é o software de implementação de aplicações de robôs. As funcionalidades do software incluem a gestão de modelos de robôs, gestão de mapas, gestão de frotas e gestão de configurações. É uma ferramenta poderosa para os engenheiros de implementação de robótica e, através da conceção conveniente da interação homem-computador, os engenheiros podem construir rápida e eficientemente o mapa de aplicações e concluir a implementação de funções de aplicação em diferentes cenários de aplicação. O produto tem uma capacidade flexível de planeamento de percursos e pode construir rapidamente o percurso. O produto encapsula de forma inteligente o complexo processo de implementação do robô, permitindo que os engenheiros de implementação o utilizem de forma fácil e conveniente para atingir o objetivo de uma implementação rápida e eficiente.
Mapeamento
Durante o primeiro mapeamento do novo cenário, apenas o controlo humano do sistema de movimento do robô registará automaticamente o mapa do cenário. Entretanto, diferentes robots podem reutilizar o mapa no mesmo cenário.
Calibração
Durante a produção e a instalação, existem algumas diferenças em termos de erros mecânicos, parâmetros de software, etc. É necessário efetuar a calibração utilizando uma ferramenta de calibração automática para corrigir as diferenças e melhorar a consistência.
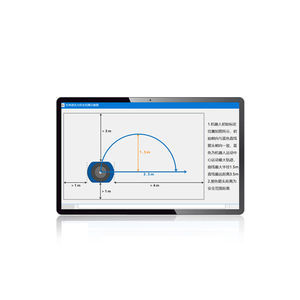
Definir o ponto e o trajeto da tarefa
No mapa existente, de acordo com as necessidades, defina os pontos de tarefa e os pontos de ligação para completar a definição do trajeto. Suporta arcos, linhas rectas, linhas em ziguezague e outras formas de definição de trajeto para satisfazer diferentes necessidades.
Configuração dos passos da tarefa
Depois de completar os passos anteriores, a lógica da tarefa pode ser configurada na ferramenta de configuração de tarefas e um único robô pode seguir os passos para executar tarefas simples.
---